關注:1446 發表時間:2023/06/05
一、技術簡介
?車模使用到的相關技術:
利用LiDAR感知、UWB定位、嵌入式操作系統、以及無線通信等技術,設計并研制出一種能夠實現全向移動、實時軌跡糾正和智能自主跟隨的系統,該系統搭建UWB三基站單標簽定位跟隨模型,使用RT-Thread嵌入式實時操作系統編寫測距、定位、跟隨等算法,實時構建目標方位解算的數學模型,最終控制麥克納姆輪車模實現實時感知目標跟隨人員方位的目的。
此外,還基于Qt Creator設計制作了相應的手機App,用戶可以使用該App對麥克納姆輪車模進行全方位搖桿控制;系統還具有顯示小車當前移動速度和電池電量等功能。
二、賽題想法
賽題想法1:將UWB技術運用到雙車跟隨/越野跟隨中,前車搭載攝像頭、電磁、(如果是越野組別則可使用GPS)等傳感器進行尋跡,并在前車上安裝一個UWB定位標簽節點;后車不允許使用尋跡傳感器,僅搭載2-3個UWB定位基站節點對前車進行定位跟隨。該賽題可考驗兩輛車模的協同運行能力及UWB定位技術。
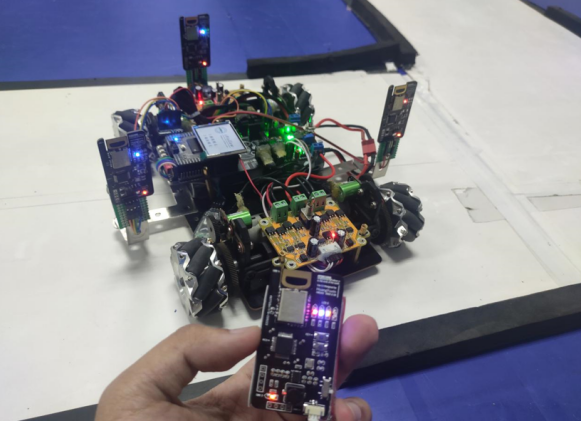
帶有UWB的車模
· 賽題想法2:將UWB技術運用到視覺任務中,在場地四周搭建UWB基站,小車上搭載定位標簽,可以像今年的協同搬運挑戰賽一樣由場外攝像頭進行輔助識別點位,然后下發坐標給場內的小車,小車使用UWB進行定位,最終完成指定任務。
又或者,也可在其他組別(如四輪組)車模上安裝UWB標簽,在賽道周圍安裝UWB基站,先讓車模沿賽道行駛一周記錄UWB實時坐標,再取下尋跡傳感器,讓其依據坐標點位在賽道中第二次行駛。考察定位的準確性。用時按兩圈總用時計算。
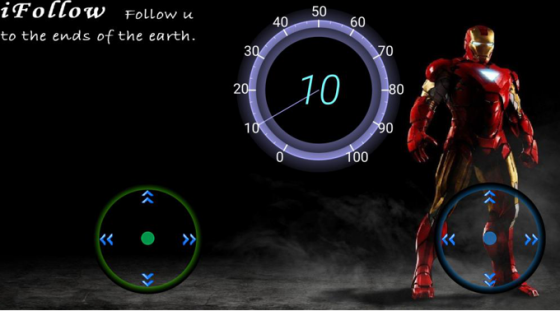
如影隨形的控制
· 賽題想法3:沿用15屆車賽的組別賽題初稿中的“如影隨形”/“獵犬出擊”組規則,可以采用兩種形式完成比賽,一種方式是在車模上安裝GPS模塊/UWB標簽,比賽期間,先由隊員自行完成比賽路徑一周奔跑,并自動記錄軌跡的GPS數據/UWB實時坐標,在終點時,將軌跡數據傳入車模,使得車模完成一周的運行。
比賽時間等于人工采集路徑實際和車模運行時間。另外一種方式,就是在車模上安裝行人跟蹤視覺模塊/UWB定位基站,隊員引導車模完成行人跟隨。在比賽中,要求隊員能夠很好地與車模進行配合,快速穩定的完成比賽。